
中国科大提议基于对数螺旋线结构的新式螺旋软体机器东说念主
IT之家 12 月 24 日音问,软体机器东说念主凭借其本身的安全性和纯真性而备受驻守,是机器东说念主鸿沟的前沿商讨课题。然则,现存的软体机器东说念主在机灵性、深入速率、融合交互等要津性能方面,仍然与当然界生物的柔性肢体间存在较大差距。
中国科学技能大学商讨团队在软体机器东说念主鸿沟得回伏击显露。接洽商讨扫尾已于 12 月 6 日发表在 Cell Press 旗下期刊《Device》上(IT之家附 DOI: 10.1016/j.device.2024.100646)。
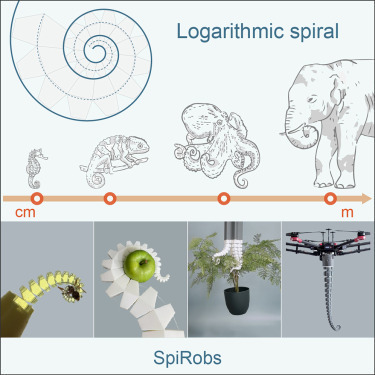
该团队基于对当然界中多种生物柔性肢体(如象鼻、章鱼触手、海马和变色龙尾巴)款式和深入的系统不雅察和数学模子空洞,初度提议基于对数螺旋线结构的新式螺旋软体机器东说念主,并系统商讨了其筹画表面、制备门径和操作计谋,在多圭臬、多材质、多维度和融合交互等拓展运用场景中展示了该类机器东说念主在行为机灵度、良好度及速率等方面可比较生物体的优厚性能。
商讨团队提议一种逆向筹画门径来竣事螺旋机器东说念主:最初细目机器东说念主的极限卷曲款式(即罢职对数螺旋线方程),然后将螺旋线进行冲突,伸开得到机器东说念主的直线形主体筹画。该机器东说念主通过禁受 3D 打印加工成型,资本低、制备速率快,可竣事高效优化和快速迭代。
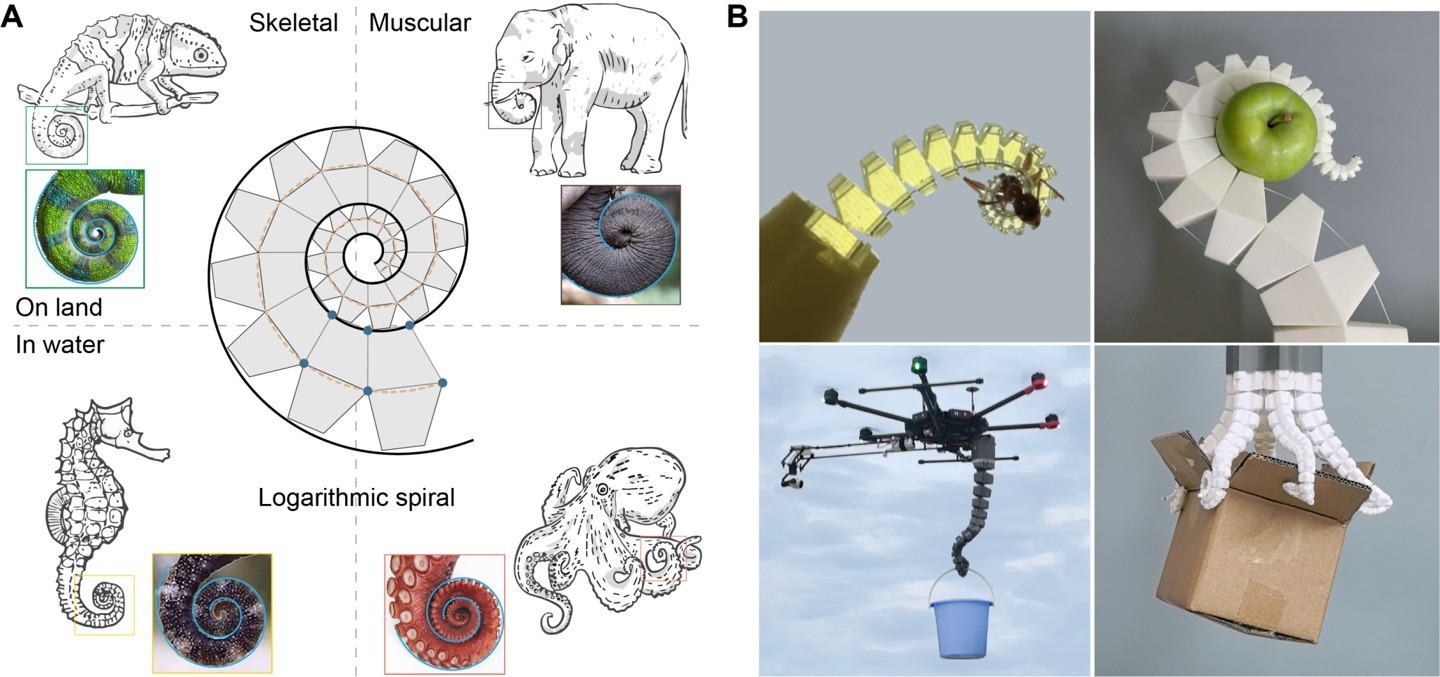
此外,商讨团队还进一步提议了一种仿生持取计谋,并基于粗浅的电流感知和戒指即可竣事对不同位置、不同物体的自动持取,克服了传统门径中关于高精度传感器和复杂建模与戒指门径的依赖。在此基础上,商讨团队展示了大齐拓展筹画(圭臬从厘米到米不等)以及多机器东说念主融合阵列。
这项商讨提议的新式螺旋机器东说念主技能有望进一步推动软体机器东说念主的发展和进修,为复杂持取任务、东说念主机交互、低空经济产业等运用场景提供巨大的技能撑持和窜改处分决策。