
效法蝠鲼的软拍浮机器东谈主:单稳态扑翼助力软拍浮机器东谈主
公共好!今天来了解一篇对于效法蝠鲼的软拍浮机器东谈主的盘考——《Spontaneous snapping-induced jet flows for fast, maneuverable surface and underwater soft flapping swimmer》发表于《SCIENCE ADVANCES》。海洋生物的拍浮模式一直是科学家们策划软拍浮机器东谈主的灵感源流,可其中的挑战也不少。就像之前效法蝠鲼策划的软拍浮机器东谈主,双稳态结构耗能又复杂。这篇盘考,提倡了单稳态扑翼软拍浮者,它会怎样管制难题,带来哪些惊喜推崇呢?让咱们沿路走进这个神奇的软拍浮全国!
*本文只作念阅读札记共享*
一、盘考布景与挑战
(一)生物启发的软拍浮机器东谈主
海洋中领有各类拍浮模式的动物,如蝠鲼等,为软拍浮机器东谈主的策划提供了丰富灵感。蝠鲼的胸鳍通顺景观独有,其背腹扁平的体魄和宽大的胸鳍所展现的mobuliform拍浮模式,具备快速、高效和高灵活性的特色。这种生物特征眩惑了科研东谈主员勉力于效法其拍浮时局来策划软拍浮机器东谈主,但当前要已毕这么的机器东谈主仍面对诸多挑战。
(二)现存盘考的局限
近期对于蝠鲼状软拍浮机器东谈主的盘考,虽尝试使用软材料和扑翼机制,并勾通复杂的能源单位和限度模块来效法mobuliform拍浮,但探究尚未达成。举例,之前盘考的双稳态扑翼软拍浮者,虽在一定进度上已毕了较高的拍浮速率(3.74体长/秒)和效用(1Hz驱动频率下),但仍存在诸多问题。双稳态结构在能量期骗上效用较低,其策划和限度复杂,尤其是在周期性通顺和出动方面。如在双稳态扑翼拍浮者中,已毕一个扑翼通顺周期需要两个驱动输入(底部驱动层充气-放气,顶部驱动层充气-放气)和四步驱动序列,这不仅增多了分量,还铁心了速率和能量效用。而且,此类软拍浮机器东谈主在无结构水下环境中的灵活性,尽头是在不同深度拍浮和抗碰撞才略方面,仍有待探索。此外,以往盘选取软拍浮机器东谈主的波形通顺对推力产生、效用和拍浮速率的影响尚未取得充分盘考。
二、单稳态扑翼软拍浮者的革命策划
(一)策划组成
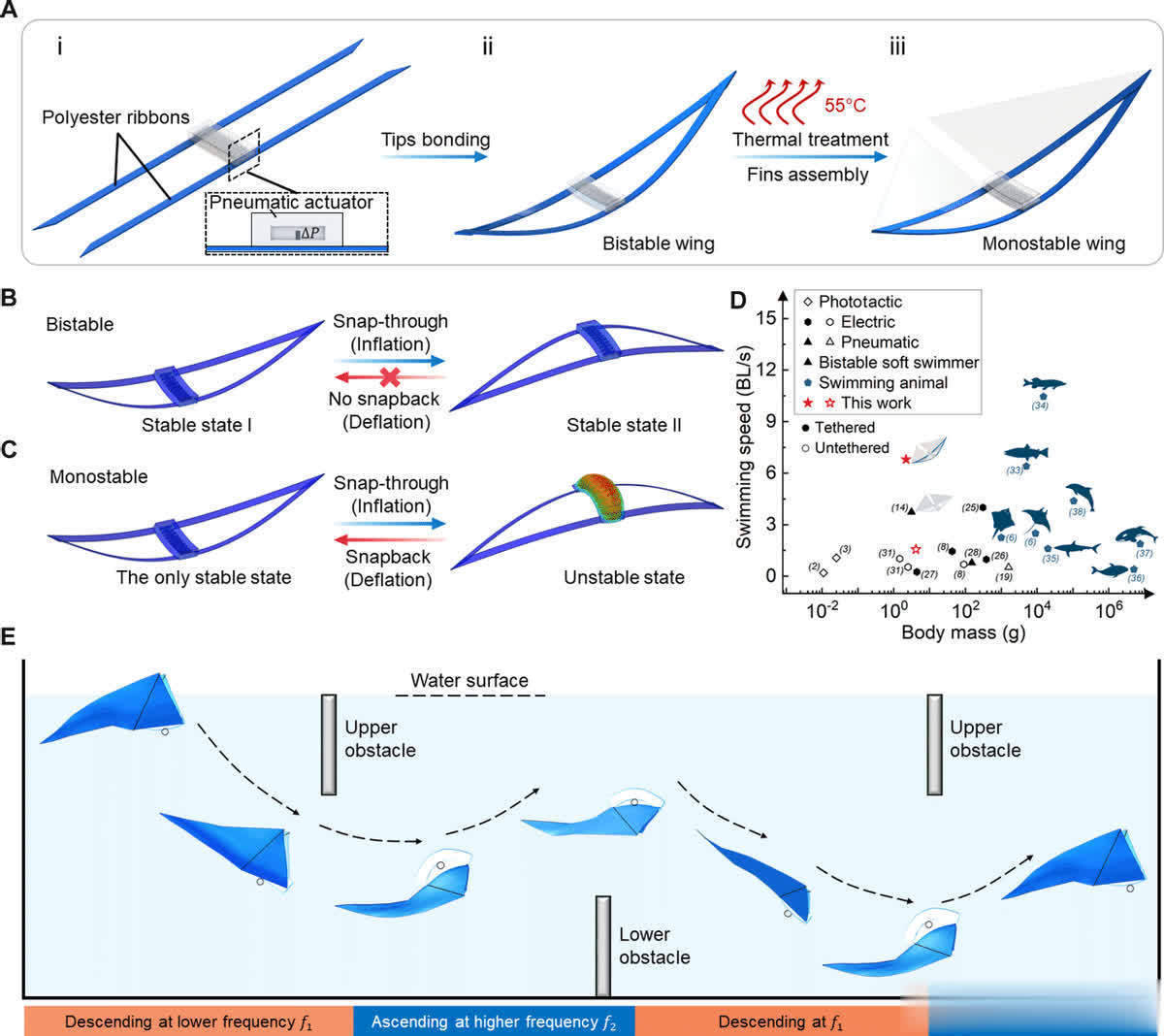
为克服上述挑战,本次盘考提倡一种新的软拍浮机器东谈主策划,其具有单稳态扑翼。该软拍浮者由软气动迤逦致动器行为体魄(含单层顶部空气通谈)和一双单稳态翅膀组成。单稳态翅膀的制作经过是先将两个平行柔性丝带终局粘合酿成双稳态预弯框架翅膀,然后通过一定时长的热处理开释预应力,使其革新为单稳态。同期,还在软拍浮者上附加薄膜和软推广鳍以增强推动力。

(二)驱动行为上风
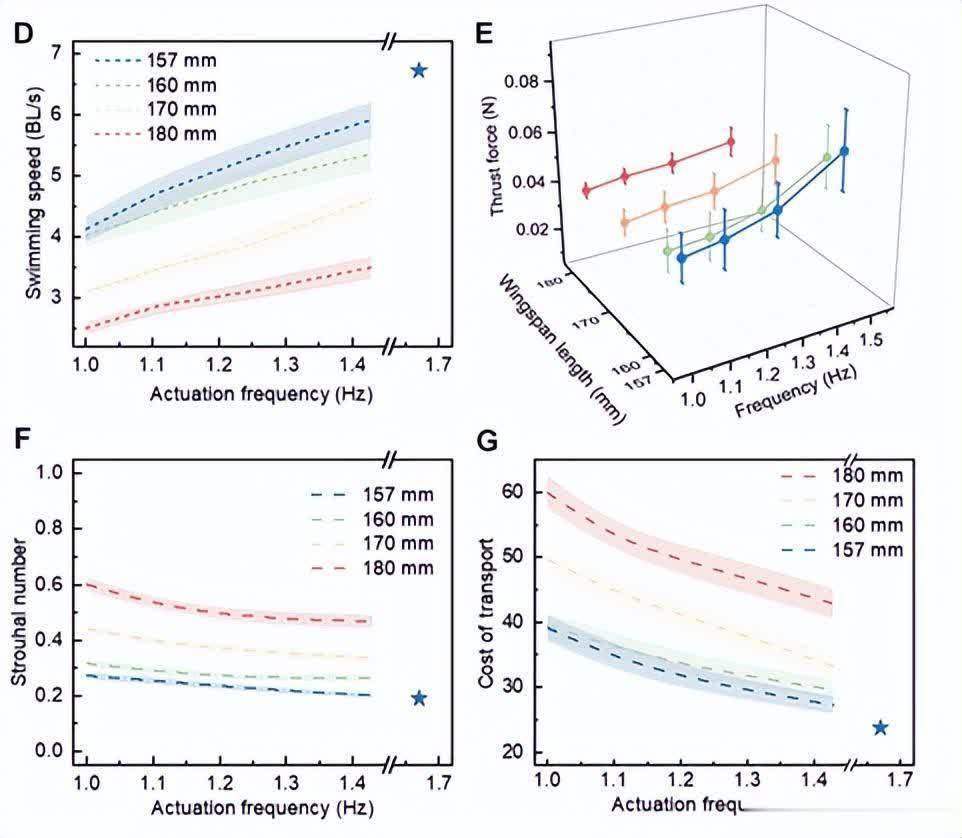
单稳态翅膀与双稳态翅膀在驱动行为上有权贵区别。在双稳态情况下,翅膀充气后向下扑动,放气后仍保合手凸时局态(说明景色II),需特别驱动才智还原开动景色;而单稳态翅膀放气时,会在弹性还原力作用下自觉朝上扑动回到开动说明景色,无需特别能量输入。这种自觉的还原行为带来诸多上风,它极地面简化了策划、驱动和限度经过,仅需限度一个驱动输入,便于已毕无缆策划,收缩了拍浮者分量,栽植了能量效用,还能加快峰值驱动频率,使翼尖已毕方形波形通顺,产生比双稳态和其他扑翼拍浮机器东谈主更高的推力和功率。举例,该软拍浮者在1.67Hz的低驱动频率下,速率可达6.8体长/秒,比双稳态策划快近两倍,且能耗镌汰1.6倍,速率以至卓越了一些快速拍浮的动物,如大欧好意思鲑鱼。

三、双稳态-单稳态革新的缺点盘考
(一)相图分析
在55°C下,不同翼展长度的翅膀经过不同热处理时候后的双稳态到单稳态革新的相图。不错看出,对于给定的翼展长度,跟着热处理时候增多,翅膀沉静从双稳态革新为单稳态,且翼展较小的翅膀由于储存的弹性应变能较高,需要更万古候来开释能量完成革新。不同翼展长度翅膀在热处理前后的时局对比可直不雅不雅察到这一变化。
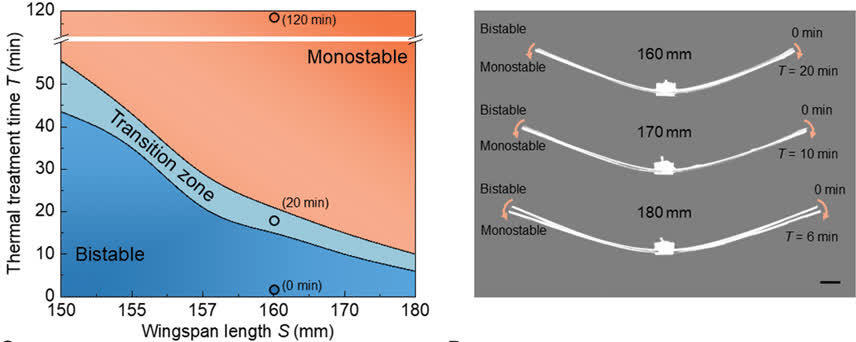
(二)力-位移弧线与能量景不雅弧线
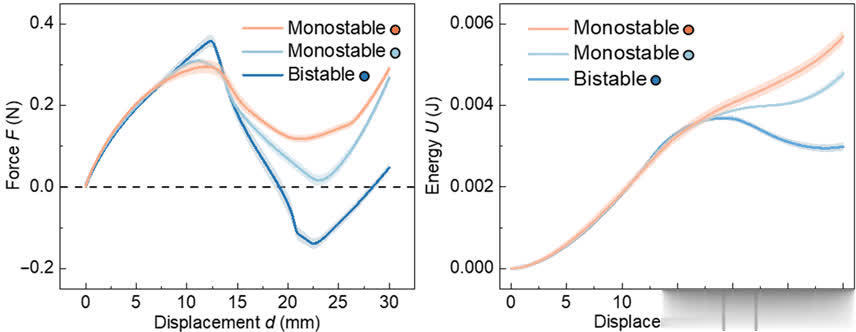
以160mm翼展的翅膀为例,在未热处理(T=0min)时,其力-位移弧线走漏出负斜率和负力,能量景不雅弧线有两个局部能量最小值,标明此时翅膀为双稳态。当热处理时候增多到约20min时,力-位移弧线接近零力线,对应相图中的革新区域,此时能量景不雅弧线仅在d=0处有一个局部最小值,标明翅膀已革新为单稳态。进一步增多热处理时候,力-位移弧线保合手在零力线上方,考据了单稳态的说明性。这一盘考为策划快速单稳态扑翼机器东谈主提供了进犯率领,即聘请处于革新区域临界景色的热处理时候,可使单稳态翅膀在驱动时开释最大能量,已毕最快拍浮速率。
四、高速高效拍浮性能的深度剖判
(一)拍浮步态与通顺轨迹
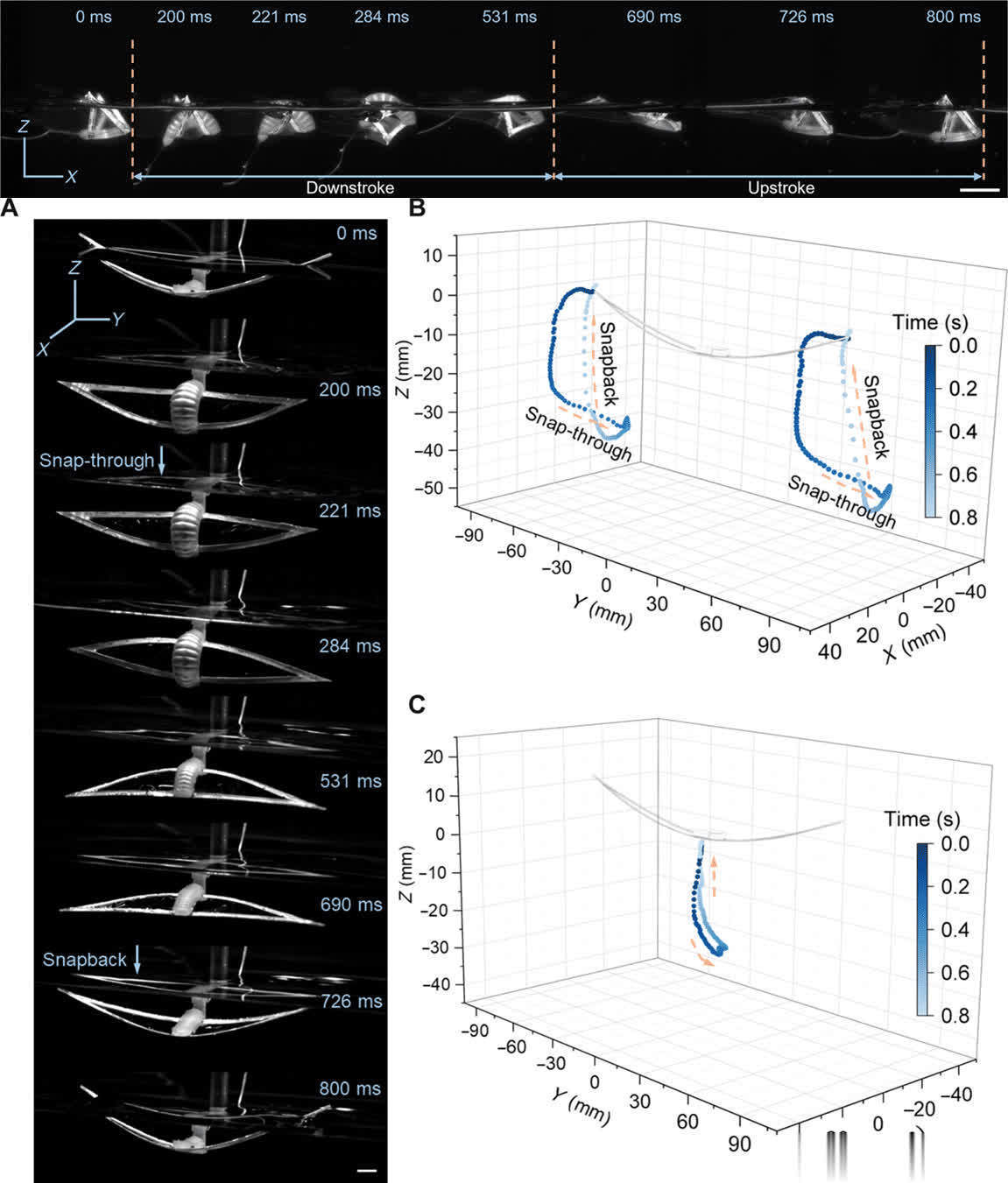
以翼展160mm、热处理时候20min的单稳态扑翼机器东谈主为例,在驱动频率为1.25Hz、驱动压力为61kPa时,其在一个扑翼周期中的通顺经过明晰可见。充气时,体魄向下迤逦,驱动翅膀逆时针旋转并向下扑动,在短时候(21ms)内快速加快完成向下扑动产生上前推力,随后放气时连忙自觉朝上扑动进一步推动。翅膀顶端的通顺轨迹呈高度永别称的三维“8”字形,而体魄则进行二维迤逦通顺,与双稳态软拍浮者的对称“8”字形轨迹酿成昭彰对比。这种永别称通顺使得翼尖速率呈永别称方形波形,而非双稳态和其他访佛机器东谈主的正弦波形,从而增强了推力。
(二)参数盘考与性能评估
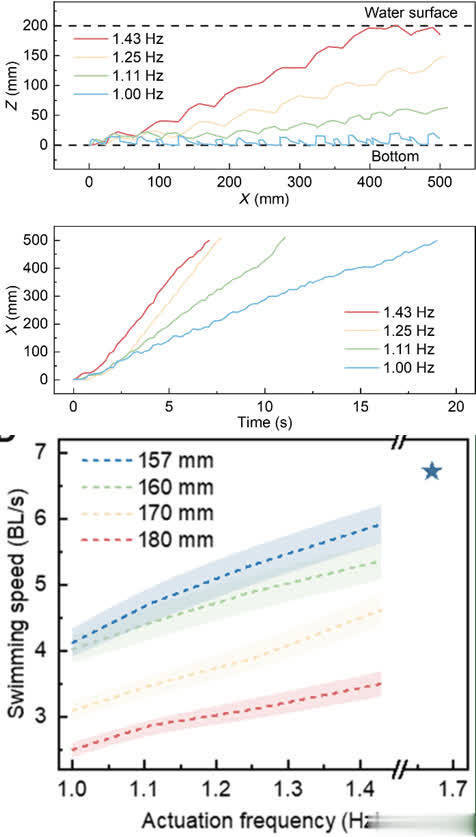
通过对不同翼展长度和驱动频率的单稳态扑翼机器东谈主进行参数盘考发现,在157mm翼展和1.67Hz驱动频率下,软拍浮者可达到约156.4mm/s(约6.8BL/s)的峰值平均速率,此时产生最高推力。同期,其能量效用通过斯特劳哈尔数(St)评估,统共157mm翼展的拍浮者在不同频率下的St值均在当然聘请的高功率效用窄限度内(0.2
(三)推力产渴望制的揭示
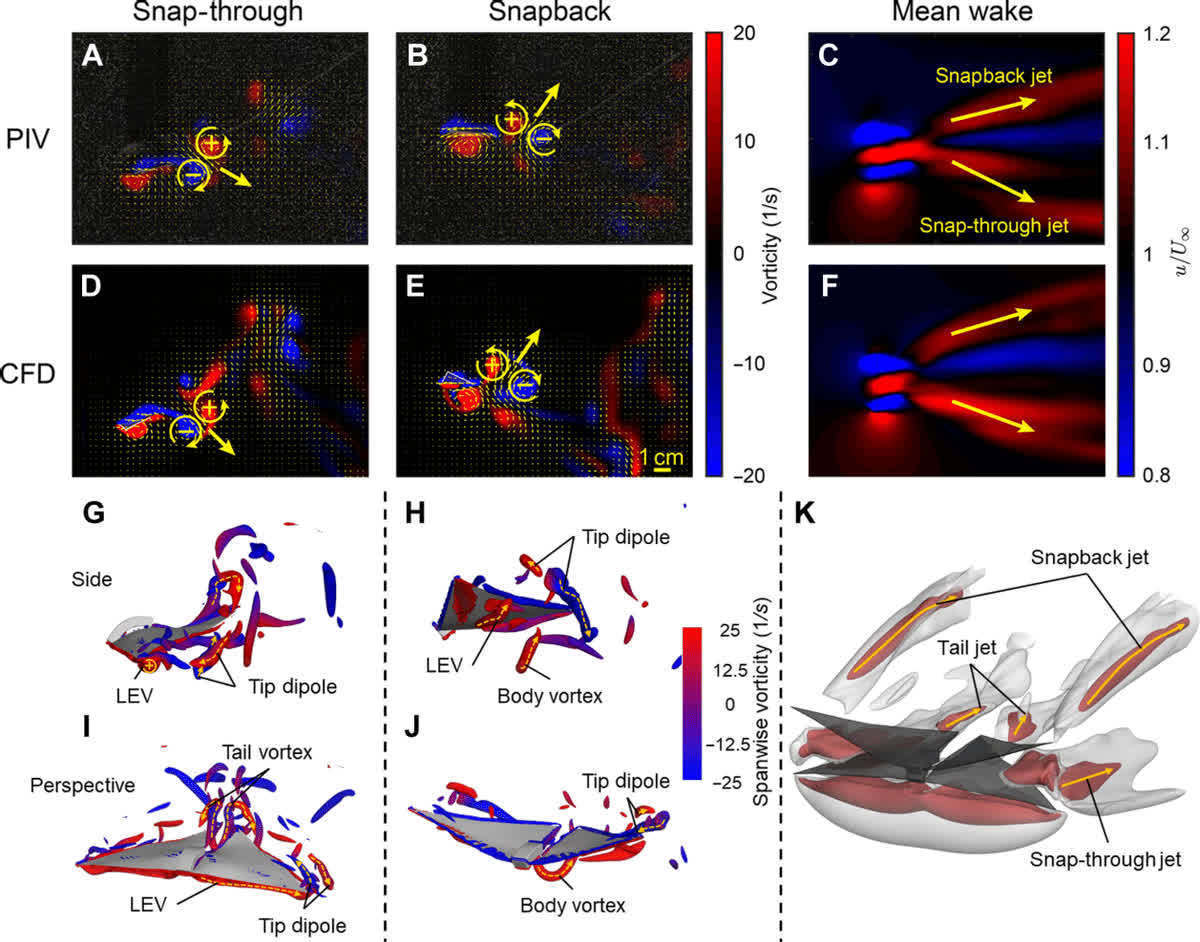
为长远贯通高速高效的原因,勾通PIV测量和CFD模拟盘考其流体能源学。在PIV践诺中,拍浮者基于划定速率和翼长的雷诺数为6500,CFD模拟使用雷诺数1500,两者驱逐高度一致。软拍浮者在向下扑动捕捉和朝上扑动还原时齐会产生一双反向旋转涡旋,这些涡旋偶极子和射流是推力产生的缺点。向下扑动时,正前缘涡(LEV)与上一周期产生的正后缘涡(TEV)吞并,酿成更强的TEV偶极子和射流;朝上扑动时则无此涡旋吞并机制,因此向下扑动产生的射流更强。
此外,在翼尖和尾缘还会酿成高动量射流,以及在翼下方产生LEV疏导的快速流动,这些共同作用使得软拍浮者大略保合手高速和灵活性。与鱼和蝠鲼的推力产渴望制比较,软拍浮者的翼尖通安产生的LEV在翼尖更杰出,且其尾迹由两个正负涡对(2P)组成,不同于很多鱼和鳐类拍浮者的反向冯・卡门涡街(2S),2P尾迹在流向和横向齐能产生强大的力,有助于守护高速率和灵活性。
五、说明导航才略的全面展示
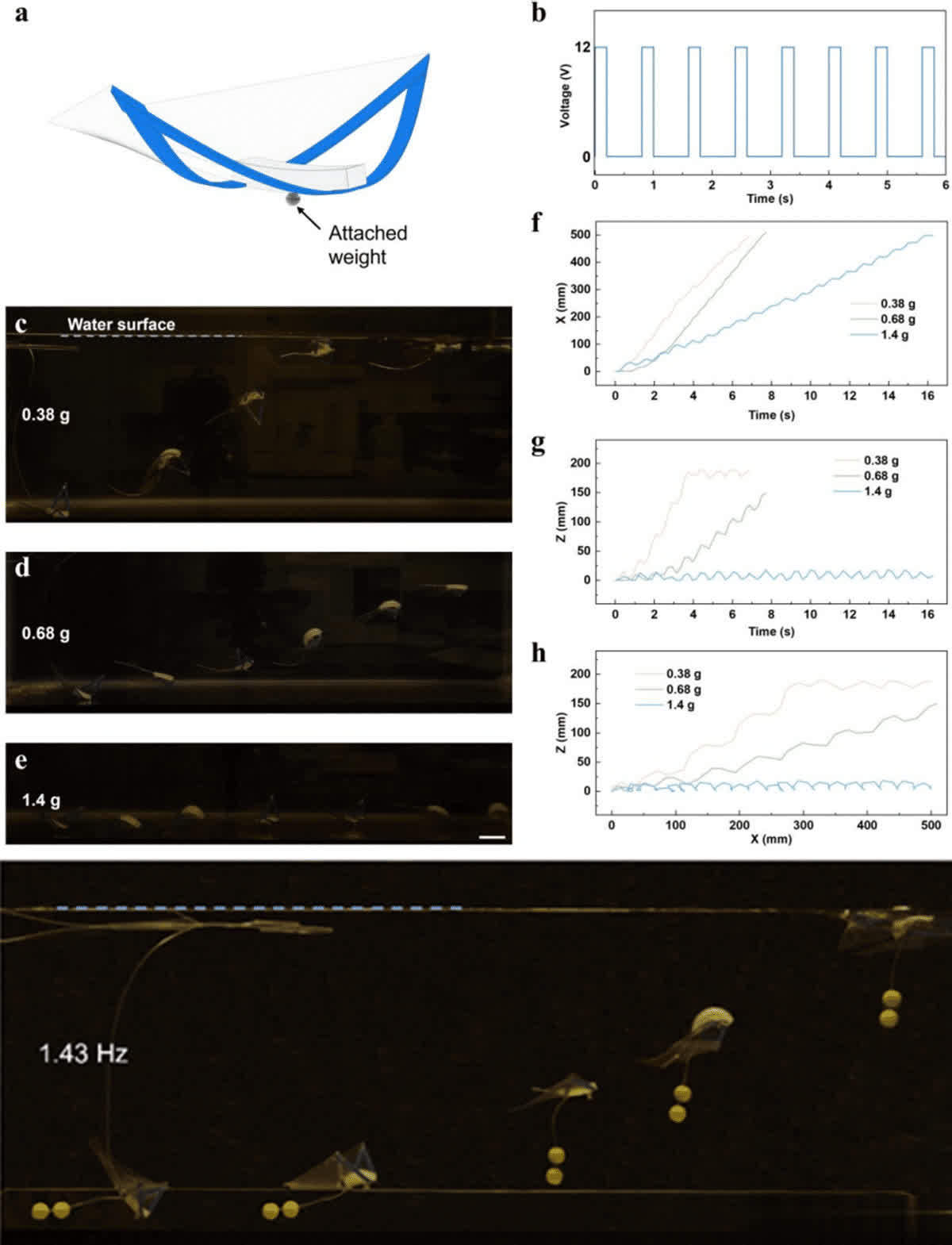
(一)多模态水卑劣泳
为使软拍浮者能在水卑劣泳,在其腹部中心附加一个小分量(如0.68g的小钢球,约为自爱的30%),不影响其扑动捕捉通顺。通过毛糙调遣驱动频率,软拍浮者可已毕多模态水下和水面拍浮。在较高频率(如1.43Hz)时,能从水底快速游向水面并过渡到水面拍浮模式;镌汰频率(如1.25Hz)可在飞腾到一定深度后过渡到该深度的巡航模式;进一步镌汰频率(如1.11Hz)可镌汰巡航深度;当频率为1Hz时,能在水底爬行。
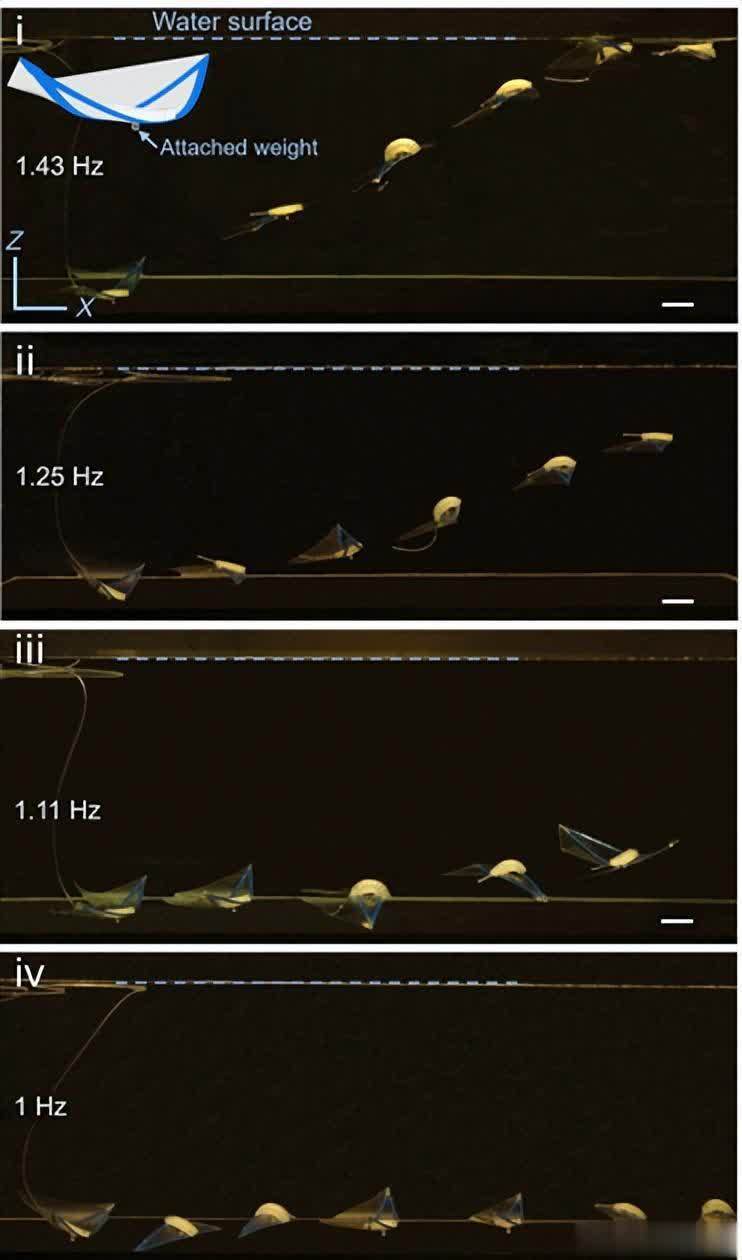
其拍浮轨迹和水平位移随时候变化明晰展示了不同频率下的拍浮模式,且平均水卑劣泳速率随频率增多而增多,与名义拍浮访佛。
同期,增多附加剧量与镌汰频率对多模态拍浮模式有雷同效果,而况在高频率(1.43Hz)下,即使佩戴与自爱额外的负载,软拍浮者仍能快速从水底游向水面。
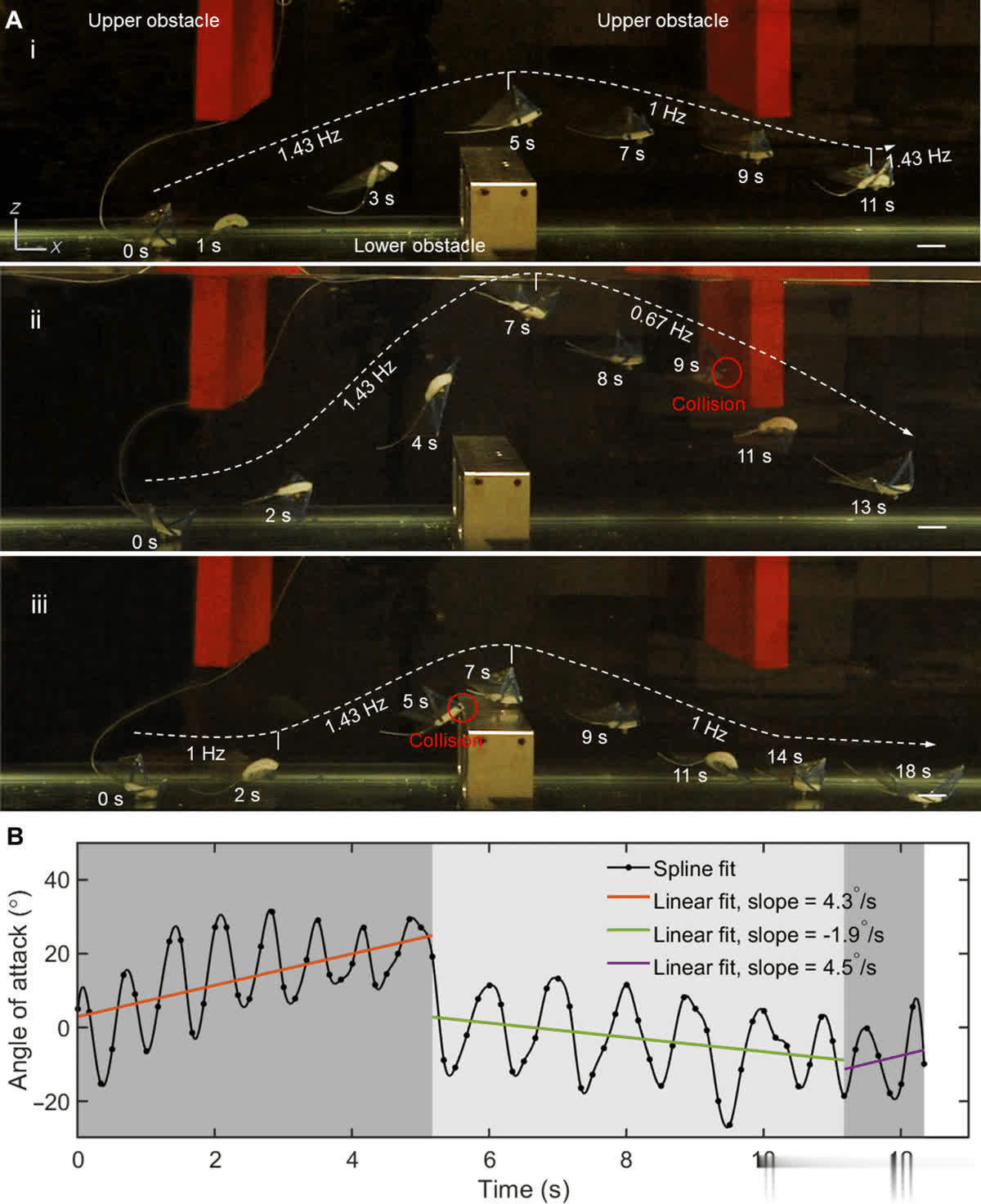
(二)艰辛物课程导航
软拍浮者凭借多模态拍浮才略,可在毛糙垂直水下艰辛物课程中通过调遣驱动频率已毕灵活导航。该艰辛物课程由两个上泡沫板和一个下金属板组成。从水底起程,在较高频率(如1.43Hz)下飞腾,镌汰频率(如1Hz)下落,再栽植频率(如1.43Hz)飞腾,通过“S”形拍浮轨迹隐没艰辛物。其飞腾和下落是通过均衡分量、浮力和升力已毕的,在扑动捕捉时,由于气室充气,浮力增多,且向下扑动射流强于朝上扑动射流,导致升力增多,从费力毕频率依赖的升力限度。
导航经过中攻角随时候的变化,当频率为1.43Hz时,浮力和升力之和卓越重力,拍浮者飞腾;镌汰频率时,升力减小,拍浮者因重力下落。此外,软拍浮者在与艰辛物碰撞时推崇出高抗碰撞性,如不才降经过中以较低频率(0.67Hz)碰撞上艰辛物时,会移时下千里后还原;飞腾经过中碰撞下艰辛物时,能通过屡次与艰辛物相互作用继续飞腾。同期,在外部扰动(如用塑料棒搅拌水)下,软拍浮者也能在移时下千里后连忙还原水面拍浮,展示了高拍浮说明性。
六、无缆软拍浮者的看法考据与性能
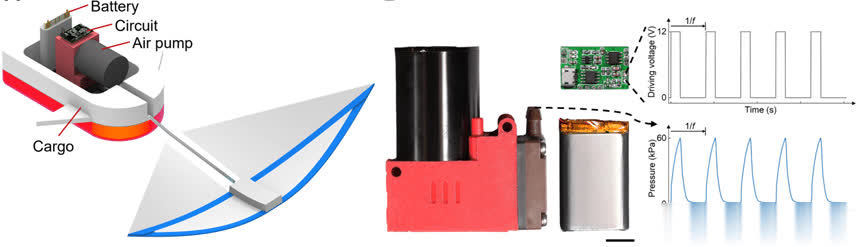
(一)策划与集成
终末,盘考东谈主员探索了无缆单稳态软扑翼拍浮者的看法策划。在软拍浮者后方集成了包含电路板、电板和气泵的泡沫货品。气泵由12-Vpp电压驱动,限度电路输出驱动信号。为栽植操作效用,对气动软迤逦致动器、翼展长度和丝带宽度进行了合乎增大,这导致驱动频率镌汰至0.77Hz(由于充气和放气时候延迟)。
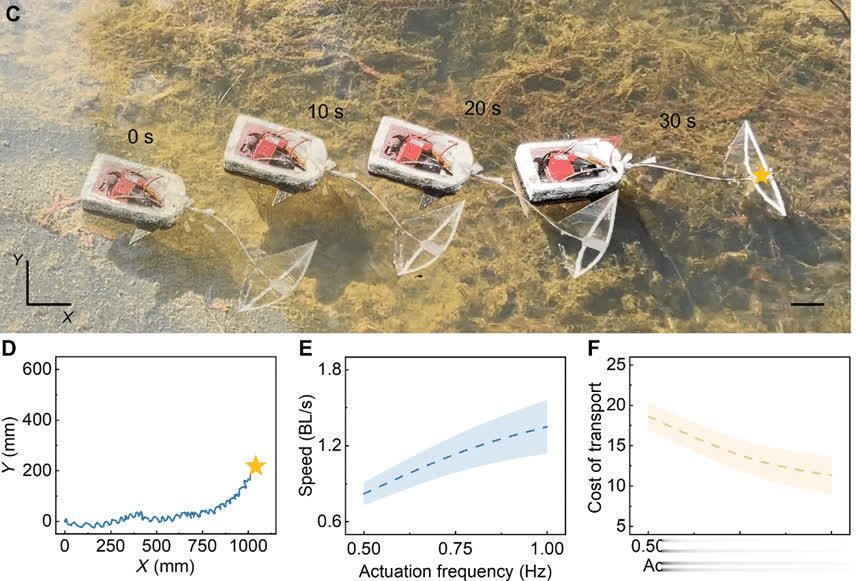
(二)户外拍浮推崇
在户外当然水池的测试中,无缆软拍浮者尽管受到风、水流等插手,但仍推崇出考究的说明性和敏捷性。其拍浮轨迹走漏,在约30秒内可游卓越1米,在0.77Hz驱动频率下速率达1.18体长/秒,输送资本为12.9。速率随频率增多而单调增多,输送资本随频率镌汰而镌汰。与其他无缆软拍浮机器东谈主比较,该无缆软拍浮者在速率和输送资本方面具有昭彰上风,其最高平均速率(1Hz时为1.35BL/s)卓越大深广无缆软拍浮机器东谈主,且输送资本远低于其他电动无缆软拍浮机器东谈主,如基于介电弹性体(CoT=339.7)和液压放大自开辟静电致动器(CoT=15.9)的机器东谈主,这体现了单稳态策划在气动软拍浮者中节能的上风。
七、盘考考究与瞻望
(一)后果考究
本盘考得手展示了期骗单稳态扑翼软拍浮者的自觉捕捉不说明性,已毕了多项前所未有的才略,包括在死板耗下达到创记录的高相对拍浮速率、多模态水面和水卑劣泳模式、在无结构水下环境中的高灵活性和抗碰撞性,以及在外部扰动下的说明拍浮才略。其背后的机制是双涡对尾迹和分叉捕捉-还原射流产生的高推力,以及频率依赖的升力使拍浮者能通过调遣驱动频率在不同深度拍浮和穿越艰辛物,与艰辛物的自安妥相互作用增强了抗碰撞性。
(二)将来瞻望
这项责任为策划快速、高效和灵活性强的水下机器东谈主系统开辟了新路子,单稳态策划在多种结构的快速有劲周期性通顺生成方面具有简化策划、驱动和限度的后劲,有望世俗应用于空气、陆地和水下的快速节能通顺或软机器东谈主的多模式应用。干系词,当前无缆策划仍存在局限性,尽头是在本色应用中,需要进一步优化策划和系统集成,以已毕更紧凑、高效的无缆拍浮者,逍遥如深海探索(生态系统、水下监视和检测)和水面及水下环境监测(水质、期侮水善良环境变化)等复杂环境中的应用需求。
八、沿路来作念作念题吧
1、以下哪种海洋动物的拍浮模式因其快速、高效和高灵活性而对软拍浮机器东谈主策划具有尽头眩惑力?
A. 海豚
B. 蝠鲼
C. 章鱼
D. 海龟
2、单稳态扑翼软拍浮者比较双稳态策划的主要上风不包括以下哪点?
A. 仅需单输入驱动即可已毕周期性扑动
B. 能已毕更高的拍浮速率
C. 不需要弹性还原力
D. 能耗更低
3、字据相图,对于翼展较小的翅膀,其从双稳态革新为单稳态需要奈何的要求?
A. 更短的热处理时候
B. 更长的热处理时候
C. 更高的热处理温度
D. 更低的热处理温度
4、单稳态软扑翼拍浮者已毕高速高效拍浮性能的缺点机制不包括以下哪项?
A. 对称的正弦波形通顺
B. 单稳态捕捉不说明性疏导的推力产生
C. 涡旋偶极子和射流的酿成
D. 频率依赖的升力
5、软拍浮者在水下艰辛物课程中已毕飞腾和下落的主要旨趣是通过调遣什么?
A. 附加剧量的大小
B. 驱动频率
C. 翅膀的时局
D. 气室的大小
6、无缆单稳态软扑翼拍浮者与其他无缆软拍浮机器东谈主比较,其上风主要体当今以下哪个方面?
A. 更高的驱动电压
B. 更大的尺寸
C. 更好的速率和输送资本推崇
D. 更复杂的限度模块
参考文件:
Haitao Qing et al. Spontaneous snapping-induced jet flows for fast, maneuverable surface and underwater soft flapping swimmer. Sci. Adv. 10, eadq4222(2024).