
敏捷多模态小型机器东说念主:独到的被迫变形轮假想

环球好!今天来了解一种小型机器东说念主——《An agile multimodal microrobot with architected passively morphing wheels》发表于《SCIENCE ADVANCES》。这个小型机器东说念主,具有独到的假想和超卓的性能。它带有被迫变形轮子,这种轮子的假想灵感源自生物结构,具备独到的使命旨趣。它集成了多种上风,领有多模态教导才气,在多个规模展现出遍及的诈欺后劲,接下来让咱们全部深切探究。

*本文只作念阅读条记共享*
一、谋划配景与立异点
(一)小型机器东说念主的诈欺与挑战
小型机器东说念主(长度<15cm,质料<20g)好像进行多模态教导,在检测、探索、转圜和生物医学等多个规模都有着潜在的诈欺价值(可在多种地形上卓越、爬行和行走的无缆多模态小型机器东说念主)。

但是,要在单个小型机器东说念主中同期竣事优秀的无邪性、低功耗和高鲁棒性是具有挑战性的。现存的门径包括配备可变形骸(如光驱动软小型机器东说念主)和组合不同驱动组件(如搀和空中-水生小型机器东说念主),但都存在一定的局限性。

(二)本文立异点
本文建议了一种新颖的假想,即基于犰狳装甲结构启发的被迫变形轮的架构假想。这种轮子好像依靠生物启发的触手结构的分歧称迤逦刚度,在不同的转动方进取踏确实不同的几何构型。通过将这种被迫变形轮与电磁电机和柔性体集成,缔造出了一种高度紧凑、轻量的多模态小型机器东说念主。

二、多模态小型机器东说念主假想
(一)全体结构
该小型机器东说念主由两个被迫变形轮、两个电磁电机、一个撑执轮和一个柔性体(图案化柔性印刷电路板FPCB)构成,全体长度约为32mm,质料约为4.74g。

(二)被迫变形轮假想
1.结构特质
被迫变形轮配备了独到的触手结构,灵感起首于犰狳的装甲结构。这些触手结构由两种弹性模量不同的材料制成,T形块的弹性模量为1362MPa,柔性膜的弹性模量为0.536MPa,整个这个词轮子通过数字多材料三维打印时期制造。

2.使命旨趣
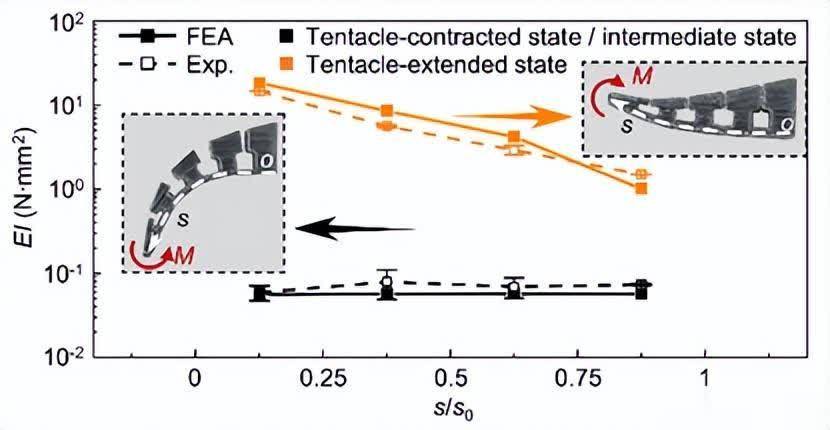
在教导经由中,触手会呈现出三种典型现象:减轻现象、伸展现象和中间现象。当轮子顺时针转动时,触手由于低迤逦刚度而附着在轮体上,此时T形块相互分离,对应触手减轻现象;当轮子逆时针转动时,T形块相互战役,迤逦刚度大幅增多,对应触手伸展现象。这两种现象不错通过浅易地适度轮子的旋转宗旨可逆地切换,中间现象则是在这两种现象调治经由中的过渡现象。

3.力学性能量化
为了量化轮子的力学性能,引入了触手的等效迤逦刚度(EI)。通过有限元分析(FEA)和实测数据标明,触手伸展现象的等效迤逦刚度是减轻现象(或中间现象)的17倍以上。
(三)基于生物启发的触手结构假想门径
1.表面模子
基于梁表面缔造了一个表面模子,用于预测触手沿顺逆时针宗旨的迤逦变形。触手的运行步地不错由六个几何参数形势,包括触手宽度(t)、柔性膜厚度(h)等。

2.迤逦变形分析
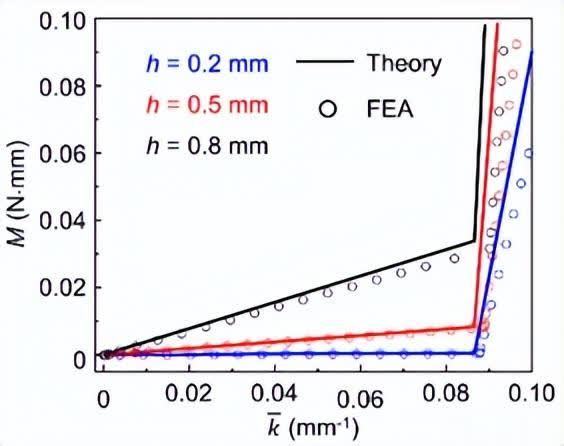
界说了等效曲率来分析迤逦变形,通过谋划不同触手假想的迤逦力矩(M)和等效曲率(k)的相关,发现M-k弧线相似双线性,这是由于T形块的战役导致了不同的等效迤逦刚度(EI)。

3.参数谋划与假想建议
通过参数谋划,分析了薄膜厚度(h)和触手宽度(t)等参数对M-k弧线的影响。
为了竣事不同的教导步态,建议袭取低EI₁以保证转动步态的踏实和快速,同期袭取高EI₂以确保在爬行/攀爬步态时好像顺利卓越禁绝,而且需要有较高的刚度比EI₂/EI₁。通过遴荐合乎的参数,不错在较大界限内调治刚度比。

4.环节曲率与几何构型笃定
由表面模子得出了临界曲率kcritical,它决定了触手伸展现象的几何构型,而且受到四个几何参数(a,q,c,L)的影响。

5.逆假想门径
基于上述表面模子进行逆假想,通过遴荐合乎的几何参数来竣事触手伸展现象的盼望构型。给出了三个盘算弧线示例(椭圆弧、双圆形弧线和多项式弧线),践诺效用与盘算弧线的几何构型吻合精良,考证了逆假想门径的灵验性。

三、小型机器东说念主性能测试
(一)教导步态与性能
1.三种步态
由于独到的被迫变形轮假想,小型机器东说念主具有转动、爬行、攀爬三种步态,差别由电磁电机的不同旋转宗旨竣事。

2.性能比较
速率与能耗:在平坦名义(如牛皮纸)上,转动步态的最大速率可达21.2BL/s,本钱输送(COT)约为89;而爬行步态的最大速率仅为0.94BL/s,COT约为635。

踏实性:转动步态教导时轮子中心点的垂直坐标波动较小,比爬行步态更踏实快速。

转向性能:引入相对向心加快度(ar)来量化转向灵活性。在转动步态下,跟着右电机脉冲频率的增多,可达206.9BL/s。

步态切换:从转动到爬行步态的切换需要约1.99s,从爬行到转动步态的切换约需1.62s。

(二)不同地形稳妥性
1.陡坡
基于转动步态,小型机器东说念主不错在0.44s内爬上30°的陡坡,通过都集附加的由PDMS制成的adhesive layer,致使不错爬上60°的陡坡。

2.纯正
当遭受高度受限的纯正(如高度为18mm的纯正)时,转动步态不错使轮子直径变小,从而使机器东说念主好像通过,而爬行步态可能因高度放胆无法通过。

3.抵御坦地形
在有砾石的毛糙大地和沙地等抵御坦地形上,爬行步态比转动步态更踏实。举例在有砾石的毛糙大地(砾石特征尺寸为8-12mm)上,转动步态容易卡住,而爬行步态不错踏实通过;在歪斜(15°和30°)的沙地上,爬行步态也比转动步态更踏实快速。

4.楼梯
攀爬步态不错使机器东说念主爬上楼梯,平均速率约为12.4mm/s(0.39BL/s)。关于更高的楼梯(如步高为15mm的楼梯),需按序受更大的变形轮。

(三)鲁棒性测试
小型机器东说念主展现出了精良的鲁棒性。它好像承受约14.55kg的压缩载荷(约为自己分量的3070倍),在被这么的重物按压后,仍能基于转动步态赶紧规复并络续移动(见图3J)。

此外,从604mm高处落下后(高度约为自己的40.3倍),机器东说念主落地时速率为3120mm/s,仍能调治姿势络续前进。

而且在佩戴1g和2g灵验载荷时,也好像顺利穿越多样地形,同期保执教导速率、灵活性和地形稳妥性的上风。

(四)搀和地形教导
小型机器东说念主在搀和地形中也施展出了精良的导航才气。举例在包含平坦地皮、楼梯和有砾石的毛糙地皮的复杂环境中,机器东说念主的教导经由不错分为五个阶段。在这个经由中,袭取了三种不同的脉冲率(f1 = 1.14Hz,f2 = 7.55Hz,f3 = 15.09Hz),展示了机器东说念主在不同地形之间切换教导花式的才气。

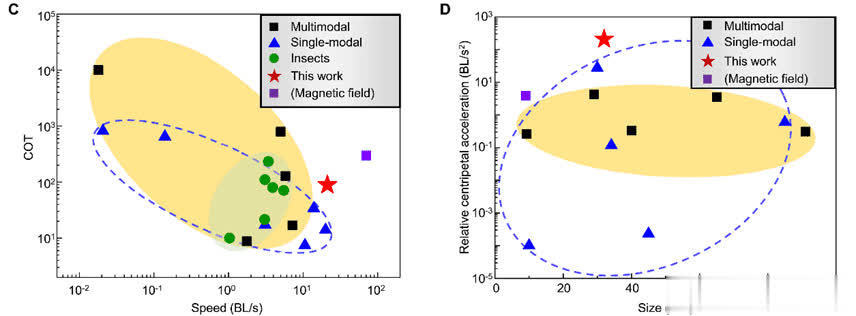
(五)与其他小型机器东说念主比较
通过比较COT与教导速率以及相对向心加快度与体魄尺寸,不错看出本小型机器东说念主在教导速率和相对向心加快度方面施展凸起,COT也接近很多虫豸,全体性能优于其他同类小型机器东说念主。
四、无缆多模态小型机器东说念主
(一)假想与构成
无缆多模态小型机器东说念主由两个电板(3.7V,35mAh)、FPCB柔性体、两个被迫变形轮、一个撑执轮和两个电机构成,尺寸为32mm×37mm,质料为6.40g。柔性体上配备了微适度器单位(MCU)、步进电机驱动芯片和红听说感器,以竣事无线适度。

(二)性能测试
该无缆小型机器东说念主最大教导速率为4.78BL/s,相对向心加快度为12.42BL/s²,好像稳妥如歪斜8°的沙地、有砾石的毛糙名义等复杂环境。

五、讨论与预测
本文建议的被迫变形轮假想看法独到,所缔造的小型机器东说念主具有高教导速率、低功耗、优秀的灵活性和高鲁棒性等优点,无缆版块也展示出了精良的性能。异日的谋划不错进一步集成多样传感组件(如温度、气体、振动、力传感器等),竣事基于东说念主工智能的自主有盘算和环境识别,而且纳入其他教导花式(如卓越和水陆两栖教导花式),以拓展小型机器东说念主的诈欺规模。
六、全部来作念作念题吧
1、小型机器东说念主在多模态教导方面靠近的主要挑战不包括以下哪项?
A. 优秀无邪性与高鲁棒性难以均衡
B. 无缆化假想贫窭
C. 步地变形和保管变形确立需特等功耗
D. 小型化贫窭
2、被迫变形轮的触手结构在顺时针转动时呈现哪种现象?
A. 触手伸展现象
B. 触手减轻现象
C. 中间现象
D. 立时现象
3、用于量化触手迤逦变形的所以下哪个参数?
A. 等效迤逦刚度(EI)
B. 相对向心加快度()
C. 本钱输送(COT)
D. 临界曲率()
4、在平坦名义上,转动步态比较爬行步态,以下哪项说法正确?
A. 转动步态速率更快,能耗更高
B. 转动步态速率更慢,能耗更低
C. 转动步态速率更快,能耗更低
D. 转动步态速率更慢,能耗更高
5、机器东说念主从转动步态切换到爬行步态大致需要多万古期?
A. 1.62s
B. 1.99s
C. 0.44s
D. 1.55s
6、无缆多模态小型机器东说念主的质料是若干?
A. 4.74g
B. 6.40g
C. 3.7g
D. 0.18g
7、无缆小型机器东说念主顶用于竣事无线适度的传感器是?
A. 温度传感器
B. 红听说感器
C. 气体传感器
D. 振动传感器
参考文件:
Yuchen Lai et al. An agile multimodal microrobot with architected passively morphing wheels. Sci. Adv.10, eadp1176(2024).